Ship to:
France
Select the desired shipping method
- Shipping Company Estimated Delivery Time Shipping Cost



Najważniejsze
- Z IMU i modułem przeciwzakłóceniowym
- Dostępne są 3 porty AUX
- Procesor: STM32F103RC przy 72 MHz
- Wejście / wyjście 7CH PWM / Sum-PPM
- Z portem I2C (I2C # 2), może użyć zewnętrznego 6050 do zastąpienia czujnika pokładowego
- Wbudowany żyroskop i czujnik przyspieszenia (MPU6050), podwójny żyroskop, może realizować więcej akcji
- Każda oś może łączyć analogowy joystick, ręczny gimbal SLR może wymagać tej funkcji
Specyfikacja
| Ogólne | |
|---|---|
| Rodzaj Nieruchomości | Bezszczotkowa płyta kontrolna gimbala |
| Zasilacz laboratoryjny | 3S 12V |
| Wersja | V1.3 |
| Prąd silnika napędowego | Maks. 2 A na silnik |
| Rozmiar | 5cm * 5cm otwór na śrubę M3, skok 45mm |
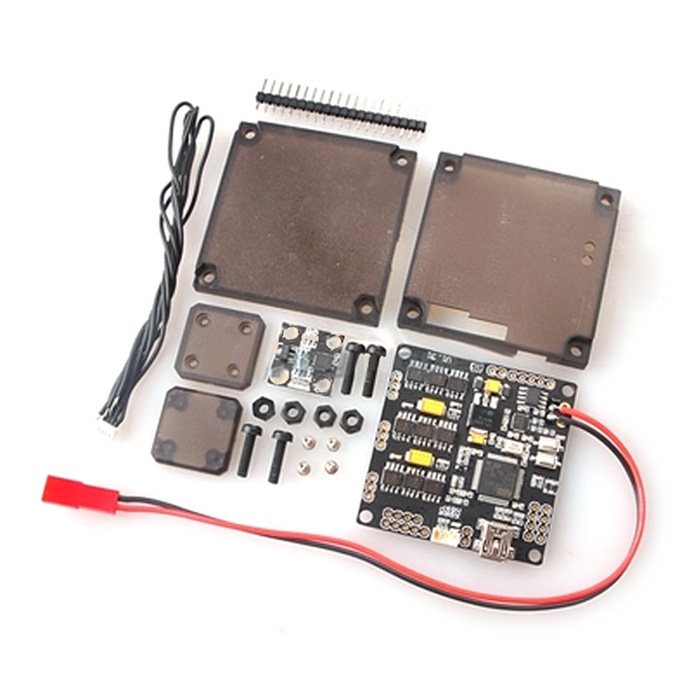
| Zawartość opakowania: | |
| 1 X bezszczotkowy kontroler | |
| 1 X obudowa kontrolera | |
| 1 X czujnik MPU6050 | |
| 1 X obudowa czujnika | |
| 1 X głowica pinowa | |
| 1 X kabel połączeniowy czujnika | |





Zdjęć klientów
Filmy z klientami
Opinie klientów
| 5 gwiazdek | 0 | |
| 4 gwiazdek | 0 | |
| 3 gwiazdek | 0 | |
| 2 gwiazdek | 0 | |
| 1 gwiazdek | 0 |
Napisać recenzję
- Wszystko (0)
- Obrazy (0)
- Filmy (0)